Share
Pin
Tweet
Send
Share
Send
एक रोबोट बांह बनाने के लिए, नालीदार प्लास्टिक ट्यूब का एक टुकड़ा, सीडी से एक बॉक्स, सुतली, गोंद और बिजली के टेप का उपयोग किया जाता है। मैनिप्युलेटर खुद को पकड़ के लिए मजबूत है, उदाहरण के लिए, एक बोतल या सेल फोन।

सबसे पहले, अपने हाथ का उपयोग करके कागज के एक टुकड़े पर एक रोबोट आर्म टेम्प्लेट बनाएं। प्रत्येक उंगली के लिए टिका चिह्नित करें।

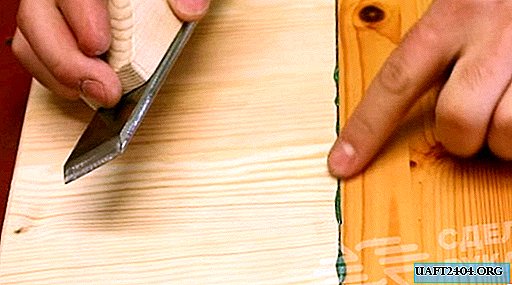
बिजली के तारों को बिछाने के लिए प्लास्टिक की ट्यूब से उंगलियां बनाई जाती हैं। ट्यूब को आसानी से एक नियमित लिपिक चाकू से काट दिया जाता है। अपनी उंगली के अंत से कलाई तक की दूरी के बराबर ट्यूब को लंबाई में काटें। यह रोबोट की सभी उंगलियों के लिए करें। परिणामी ट्यूबों पर, एक मार्कर के साथ टिका को चिह्नित करें और फिर प्रत्येक मोड़ के लिए वी-आकार में कटौती करें।

प्रत्येक उंगली ट्यूब में एक नायलॉन कॉर्ड डालें और जकड़ें। छोरों को लंबे समय तक छोड़ दें (आप बाद में उन्हें हमेशा काट सकते हैं)।

प्लास्टिक का एक टुकड़ा पाने के लिए एक पुराने सीडी बॉक्स का उपयोग करें। प्लास्टिक के कटे हुए टुकड़े का उपयोग करते हुए, "उंगलियों" से कनेक्ट करें: पोर जोड़ों के ठीक नीचे "उंगलियों" को गोंद करें।

सुनिश्चित करें कि आप अपनी उंगलियों को सही क्रम में रखें।

अब आप सुतली को ठीक करने वाले टेप को हटा सकते हैं, और "उंगलियों" को बेहतर ढंग से जोड़ने के लिए टेप के कुछ मोड़ बना सकते हैं।

अंगूठे को गोंद करें जैसा कि फोटो में दिखाया गया है, और इसे ताकत के लिए बिजली के टेप से ठीक करें।

अपने सीडी बॉक्स के अवशेष का उपयोग करके, एक कलाई बनाएं।

परिणामी रोबोट भुजा को एक स्टिफ़र ट्यूब में डालकर सबसे अच्छा प्रबलित किया जाता है।

फोम को "हथेली" और "उंगलियों" के सिरों पर चिपकाया जा सकता है।

रोबोट बांह का उपयोग विभिन्न प्रकार की एनिमेट्रॉनिक्स परियोजनाओं में किया जा सकता है। हाथ को नियंत्रित करने के लिए, आप सुतली का उपयोग सुतली के सिरों को उनके अक्ष पर तय की गई "रॉकिंग चेयर" से जोड़कर कर सकते हैं। रोबोट आर्म के जीवन में आने के लिए दो सर्वोस पर्याप्त हैं। इस मामले में, एक सर्वोमोटर अंगूठे से जुड़ा होता है, और दूसरा बाकी हिस्सों में। एनिमेट्रोनिक परियोजनाओं में अपने हाथ को अधिक प्रभावशाली बनाने के लिए, आप उस पर नरम, पतले दस्ताने डाल सकते हैं।
स्रोत: myrorot.ru
Share
Pin
Tweet
Send
Share
Send